「ゴミの自動分別機」開発ブログ#1
~卒研の開発ブログを学生の記録からお届けします!~
ごみの分別の悩みを解決「自動ごみ分別機」を製作する!
 上田情報ビジネス専門学校に入学してから、上田市のごみの分別の厳しさを知りました。燃えるゴミ、プラゴミを細かく分別しなければいけなく、とても大変です。これが自動でできたらなぁ……。
上田情報ビジネス専門学校に入学してから、上田市のごみの分別の厳しさを知りました。燃えるゴミ、プラゴミを細かく分別しなければいけなく、とても大変です。これが自動でできたらなぁ……。
そこで私たちは卒業研究で自動でごみを判断し、分別してくれる機械を制作することにしました。ミニコンピューターのラズベリーパイでAI分野での利用が広がっているプログラム言語Pythonを使い、電子工作を活用して作成します!
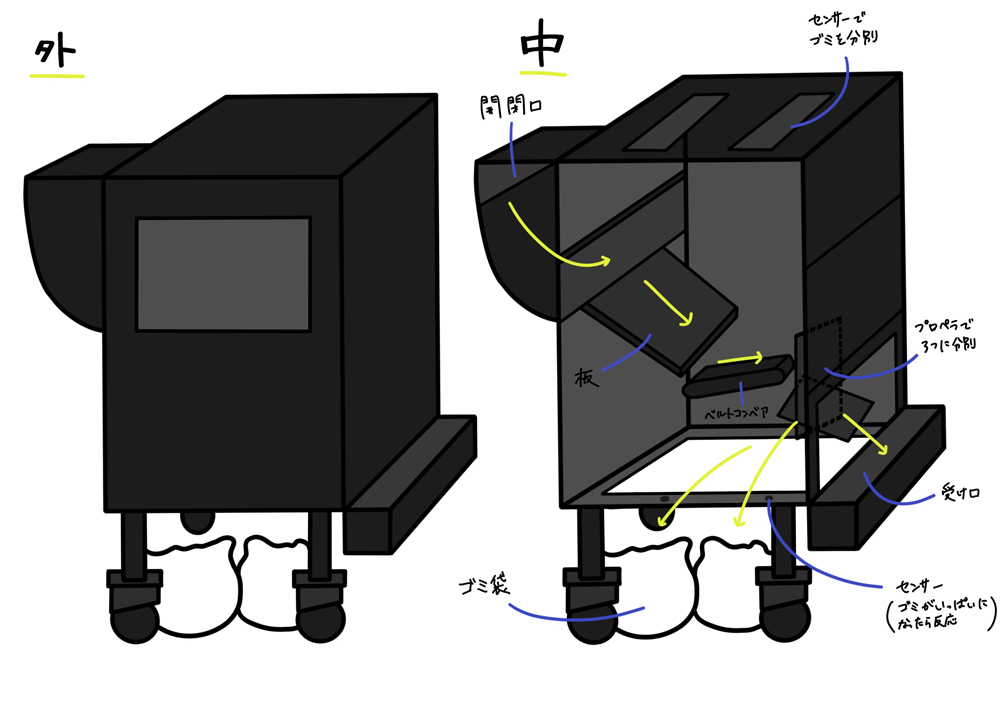
まず、下の図のような形をイメージして制作を進めました!
運んできたごみを弁の角度によって燃えるゴミとプラゴミを分別できるようにします。分別できないごみは一度外に排出してやり直しができるようにと考えています。
 手始めに小型のプロトタイプモデルを作成することになりました。赤丸のところのゴミを運ぶためのベルトコンベアとそれぞれのごみ箱に入れるための弁をレゴブロックで製作してみました。
手始めに小型のプロトタイプモデルを作成することになりました。赤丸のところのゴミを運ぶためのベルトコンベアとそれぞれのごみ箱に入れるための弁をレゴブロックで製作してみました。
次に、これを入れる箱や土台を作成します。
ホームセンターで購入したMDF やプラスチック段ボール、アルミ角材をチームメンバーの本間さんが「サンダー」、「電動ノコギリ」、「インパクト」などの工具を使用して、微調整をしながら作成しました。

90cmのアルミ角材を半分に切って4本の足を作り、キャスターを取り付けました。4本の足の真ん中あたりにMDFを固定してベルトコンベアを乗せる部分を作りました。最後に幅に合わせてプラダンを切って囲うように設置します。
土台完成!
ベルトコンベアと土台を実際に組み合わせてみました!

なかなかの出来栄えです!!弁をイメージとして作成したレゴブロックではなく、サーボモーターで制御できるようにしました。サーボモーターの制御は次回に紹介します!
投入口を開閉式にし、コンパクトで扱いやすく、外との干渉を少なくしました。
外観を作り終え、中の構造の制作に移りました。
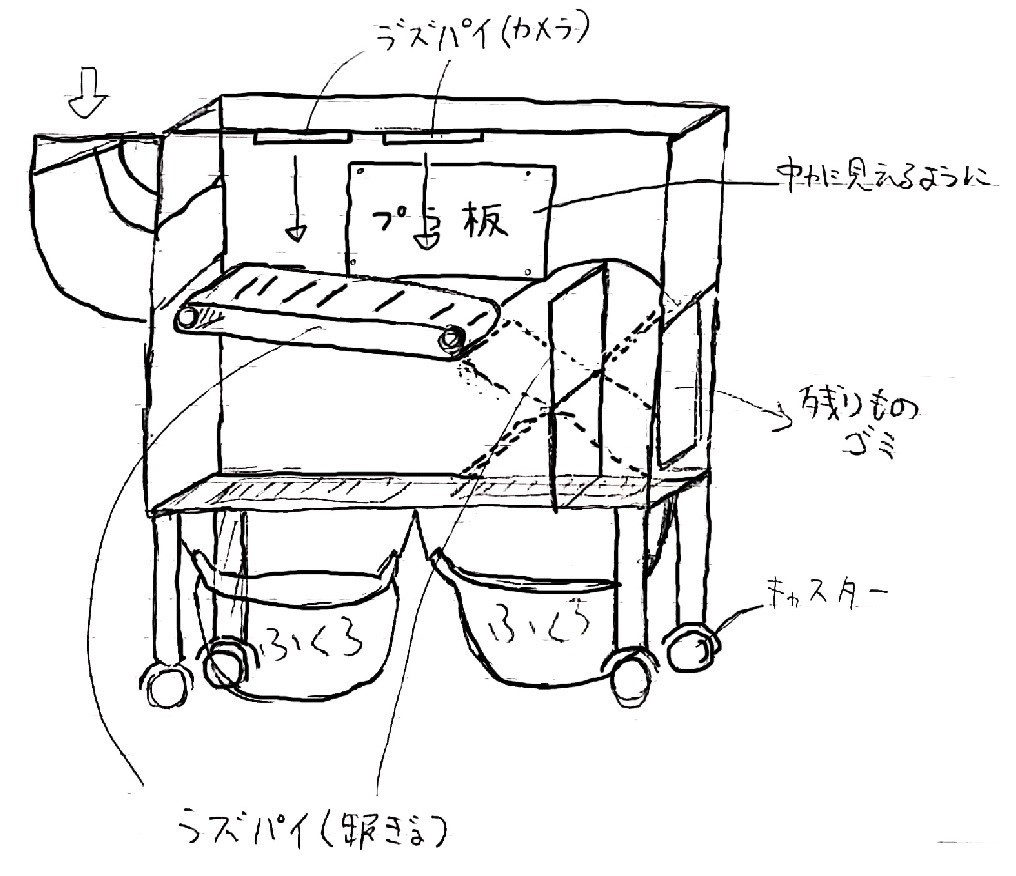
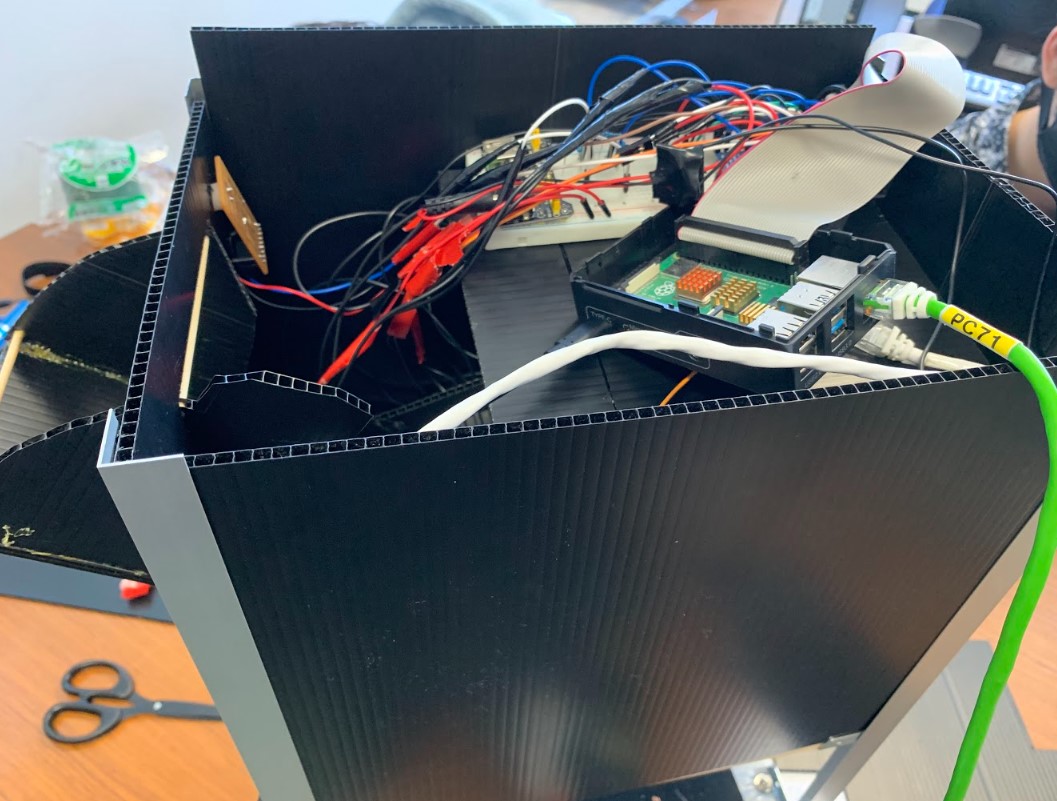 プロトタイプとはいえ、実際に動かすためには中にミニコンピューターのラズベリーパイを設置するスペースが必要です。本体にくっつけてしまえば簡単ですが、今後のメンテナンスがしやすいように設置する場所を制作します。この画像のように、中のベルトコンベアを囲う上に取り外し可能な板(プラダン)をつけてその上にラズパイや配線を設置するようにしました。
プロトタイプとはいえ、実際に動かすためには中にミニコンピューターのラズベリーパイを設置するスペースが必要です。本体にくっつけてしまえば簡単ですが、今後のメンテナンスがしやすいように設置する場所を制作します。この画像のように、中のベルトコンベアを囲う上に取り外し可能な板(プラダン)をつけてその上にラズパイや配線を設置するようにしました。
どんどんと形になってきました!まだまだ完成していませんが、先生にお披露目できるように頑張ります!
しかしここで思わぬトラブルが発生してしまいました。先程まで元気に動いていたベルトコンベアを動かすためのレゴモーター君がモーター酷使のため動かなくなりました……。レゴモーター君、今までありがとう!!
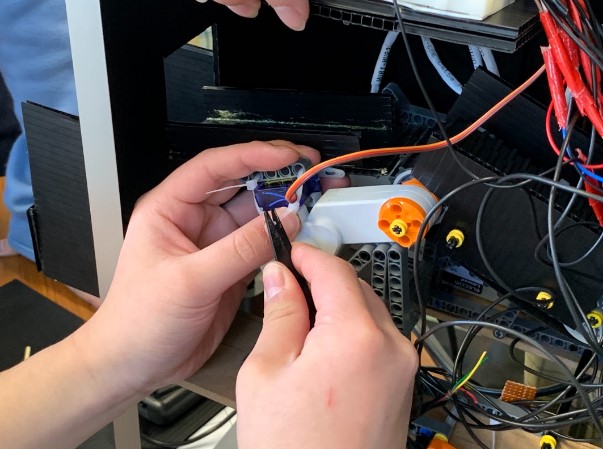 ということで初代レゴモーター君を取り外して新しいレゴモーター君を取り付けました!レゴブロックの骨組みや結束バンドで固く固定されているので他の部分を壊さないように慎重に取り外していきます。今度は電圧のコントロールなど気を付けて負担がかかりすぎないようにします。
ということで初代レゴモーター君を取り外して新しいレゴモーター君を取り付けました!レゴブロックの骨組みや結束バンドで固く固定されているので他の部分を壊さないように慎重に取り外していきます。今度は電圧のコントロールなど気を付けて負担がかかりすぎないようにします。
いよいよ、いかにごみを分別するかに挑戦です!!乞うご期待!


